research topic(s): bending-active timber, robotic fabrication, elastic kinematics, augmented reality (AR) instruction
material: tree logs, recycled HDPE, thread rods, and hardware
location: Charlottesville, VA
size: 350 sqft.
principal investigator(s): Leslie Lok and Sasa Zivkovic of HANNAH Design Office
project manager: Lawson Spencer
AR/MR fabrication: Alexander Htet Kyaw & Yehong Mi
fabrication and robotics: Sahil Adnan, Lauren Franco, Tyler Williams, Skengkun Yang, Andrea Zvonar & Chi Zhang
UVA project manager: Collette Block
UVA workshop participants: Brandon Bonner, Joshua Cauthen, Abigail Hassell, Makaela-Ann Johansen, Dina Luo, Jacob McLaughlin
assembly team: Elizabeth Carroll, Sawyer Davies, Ammon Embleton, Geoffrey Ford, Bucky Gerson, Sun Park, Charlotte Pitts, Eli Sobel
funding provided by: The Jefferson Trust, UVA Center for Global Inquiry & Innovation, UVA School of Architecture, Cornell AAP College of Architecture, Art, and Planning, Cornell Arnot Teaching and Research Forest, Cornell Atkinson Center for a Sustainable Future
additional support: Tyler Williams, the College of Architecture, Art, and Planning (AAP) at Cornell University & the Cornell AAP shop team
journal article: { pdf }
cover image: © Nana A. Iso

Aerial perspective of the Unlog A-frame pavilion | Nana Iso
Unlog is a lightweight and easily deployable timber framing method that utilizes robotic kerfing techniques to transform Emerald Ash Borer (EAB)-infested timbers into materially efficient leaf-spring components. This bending-active structural system was developed through a series of geometric studies and physical prototypes that contribute to ongoing research in the areas of robotic fabrication with natural log geometries, bending-active structural systems, deployable structures, minimum-waste fabrication, material circularity, and Mixed Reality (MR) applications for component assembly. Using only 6 logs, threaded rods, and custom recycled HPDE washers, the resulting pavilion demonstrates the feasibility of the UNLOG method to construct leaf-spring components through MR instruction and robotic kerfing techniques with EAB-infested Ashwood.

fabricator using the Microsoft HoloLens 2 to verify pavilion location and alignment | Nana Iso
animation of form finding on site

detail photo of kerfed half logs | Nana Iso
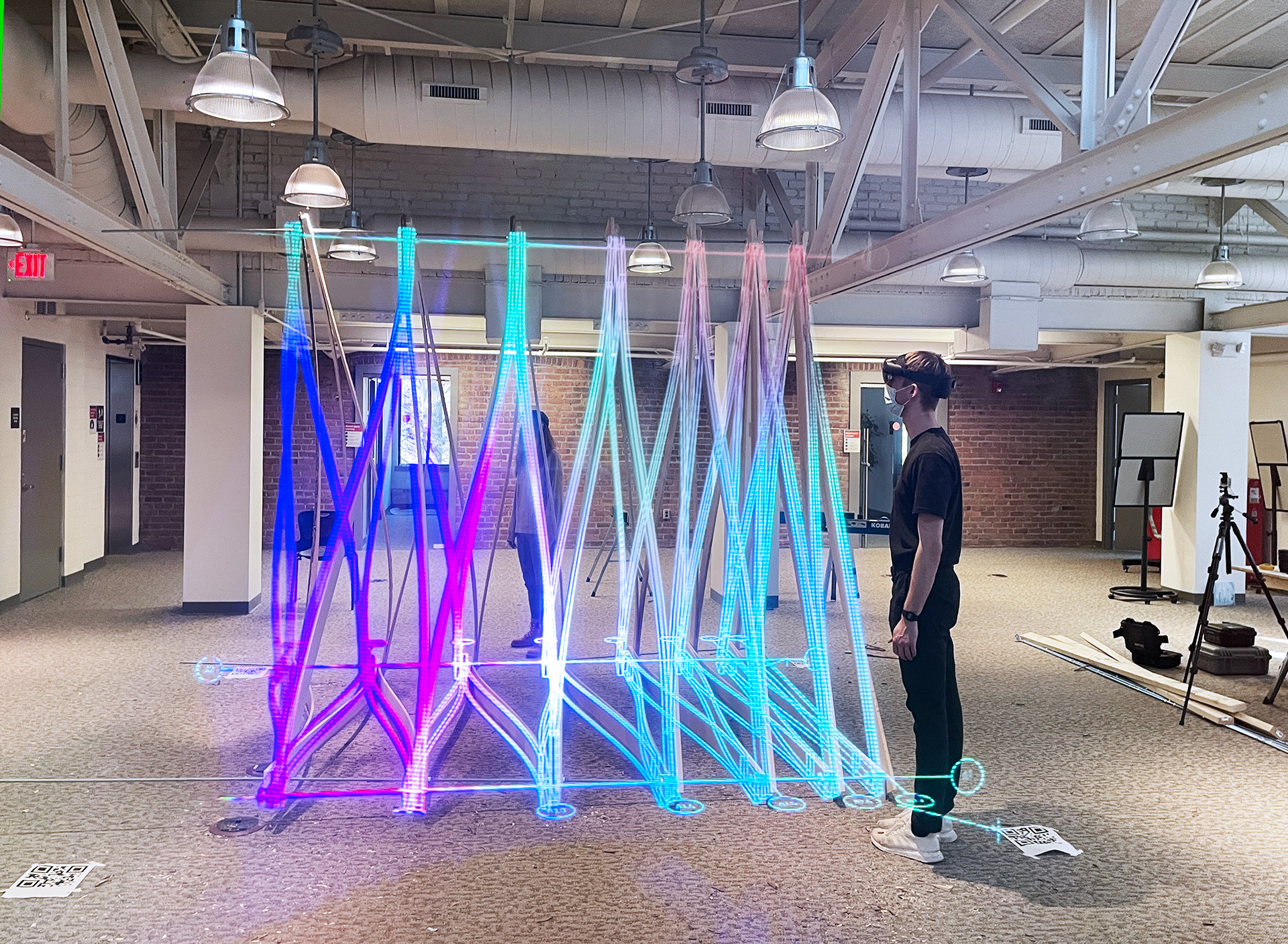
full-scale mock-up test; photographed with Microsoft HoloLens 2
video of 6-axis robotic arm with bandsaw end-effector kerfing logs

detail photo | Nana Iso

detail photo | Nana Iso
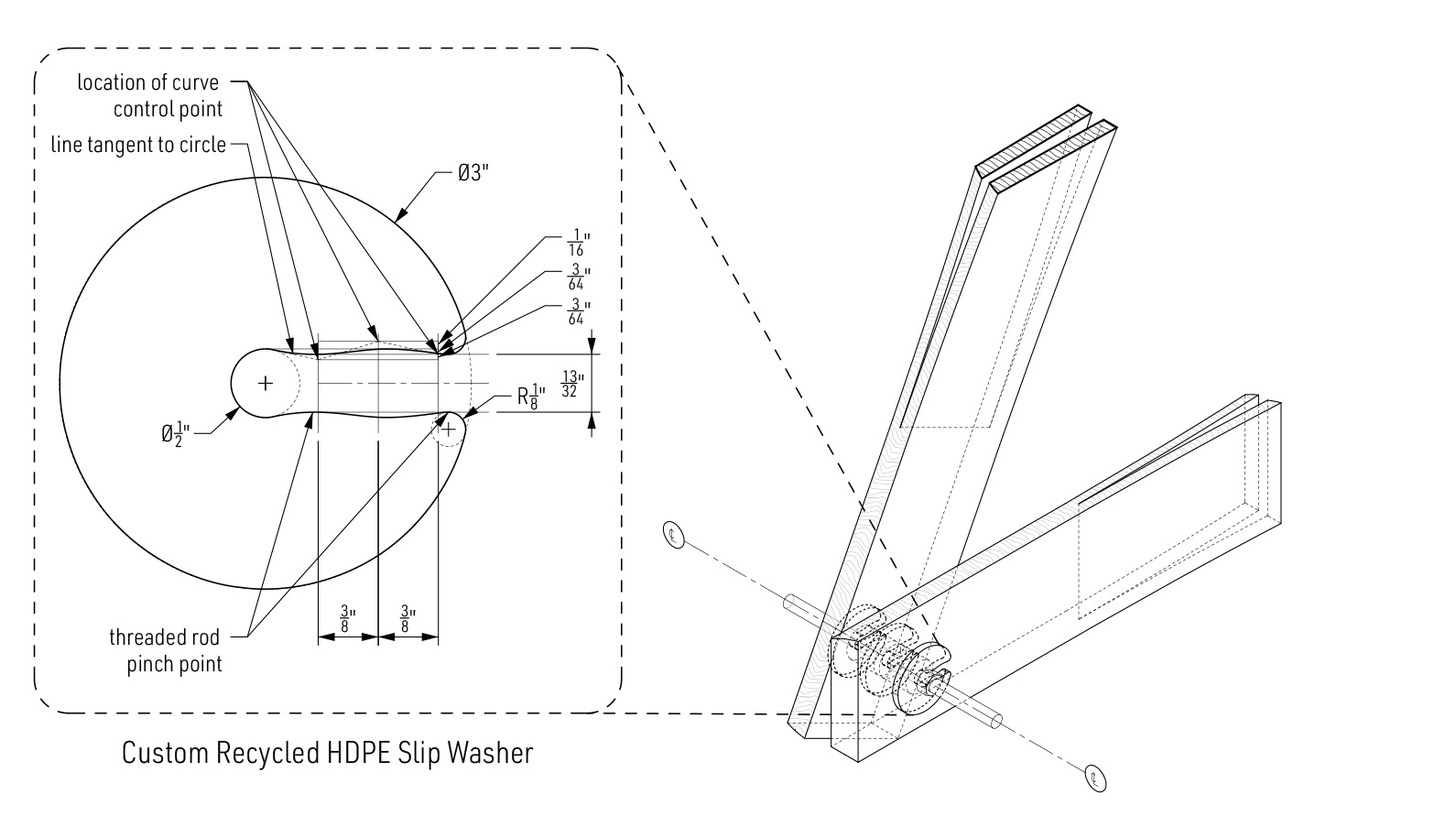
detail drawing of custom HDPE slip washer designed to snap onto a 1/2" diameter threaded rod