research topic(s): robotic fabrication, glulam optimization, timber finite element analysis
material: ash wood tree logs
location: Ithaca, NY
size: 14' beams
principal investigator(s): Sasa Zivkovic, Director of the RCL
research team: Lawson Spencer, Yifei Peng, Peter Smallidge, & Matthew T. Reiter
fabrication team: Lauren Franco, Yifei Peng, Shengkun Yang, Chi Zhang, & Lawson Spencer
funding provided by: Cornell Atkinson Center for Sustainability 2020 Academic Venture Fund (AFF) grant, David M. Einhorn Center for Community Engagement at Cornell University, 2022 AIA Upjohn Research Initiative grant
additional support: Tyler Williams, the College of Architecture, Art, and Planning (AAP) at Cornell University & the Cornell AAP shop team
journal article: { pdf }

perspective of Beam A
Slimlam is a materially optimized manufacturing method to efficiently construct structurally optimized Glulam products through robotic fabrication. Using a bandsaw end effector on a 6-axis robotic arm, boards are programmed with varying thicknesses and assembled in a specific sequence to create beam shapes that taper to resist the loading effects. This approach reduces the total amount of material and weight in glulam beam products while maintaining a load capacity comparable to uniform glulam beams with a consistent rectangular cross-section made of dimensional lumber. While the method is not dependent on a particular wood species, the research utilizes ash wood, a locally available hardwood in North America due to the ongoing Emerald ash borer epidemic.
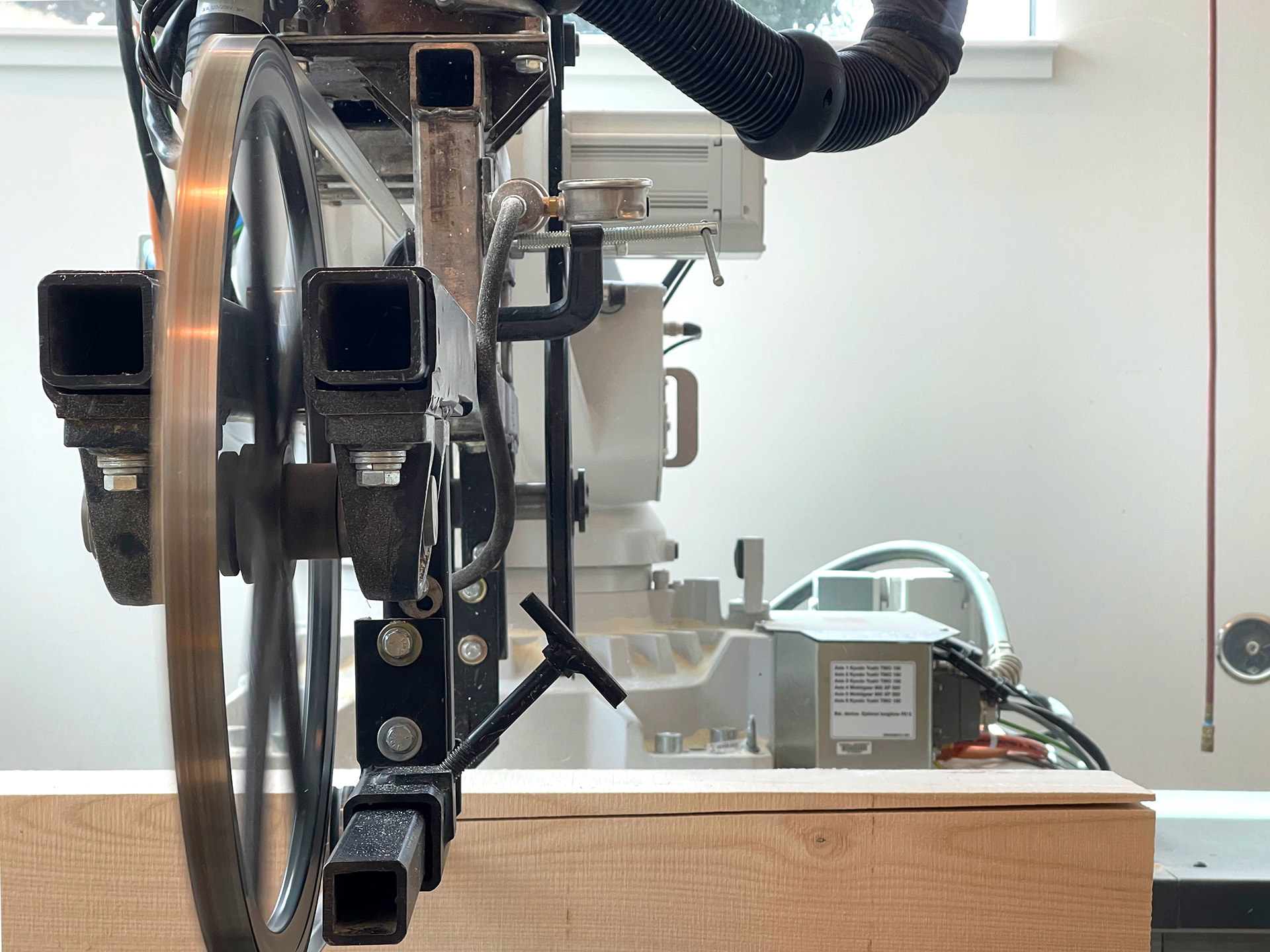
6-axis robotic arm cutting tapered boards w/ a bandsaw end-effector
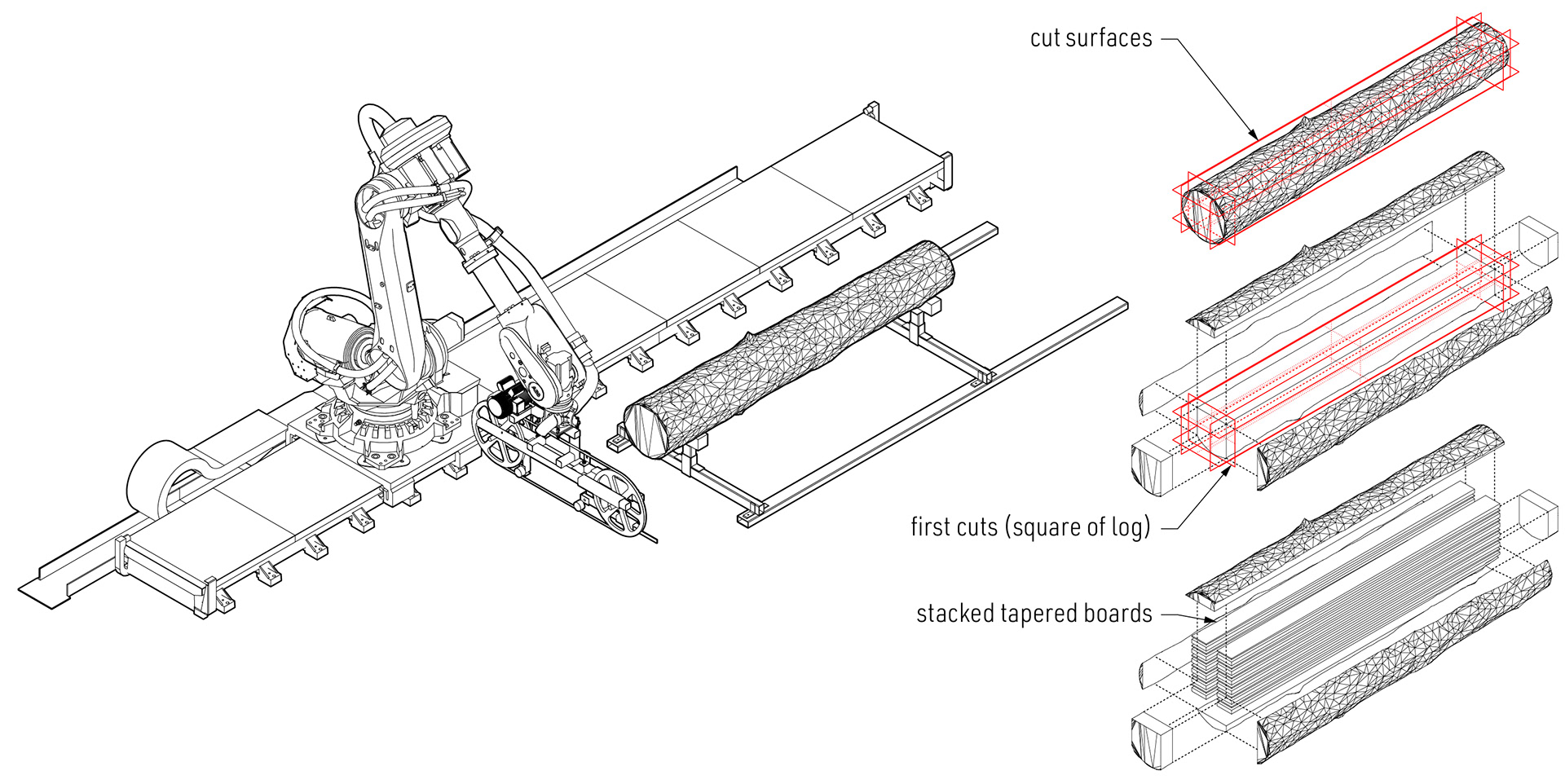
6-axis robotic arm cutting tree log into tapered boards w/ a bandsaw end-effector

6-axis robotic arm cutting finger joints into a log
6-axis robotic arm cutting tapered boards
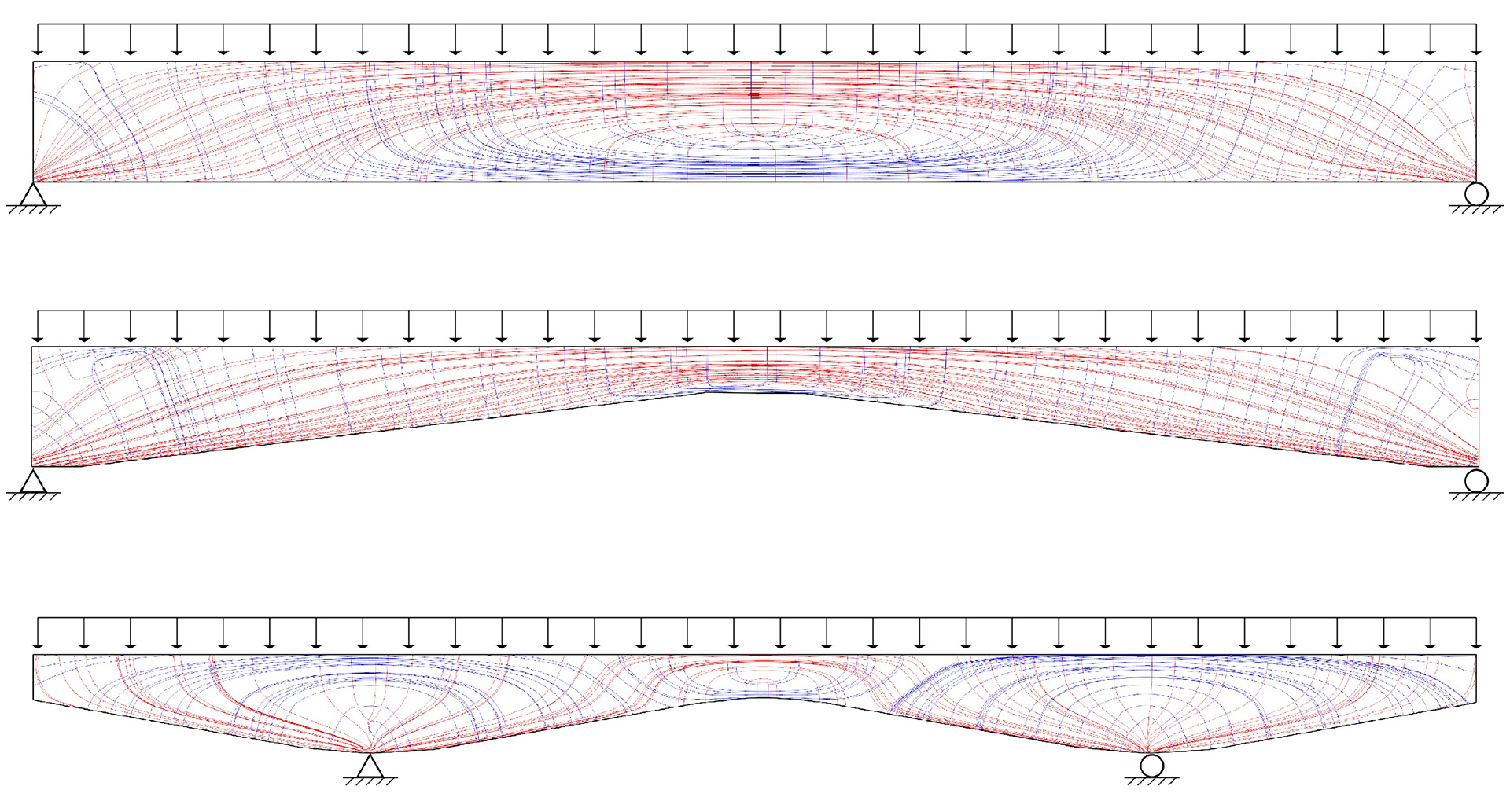
compression (red) and tension (blue) force flows through the control beam (top), Beam A (middle), and Beam B (bottom)
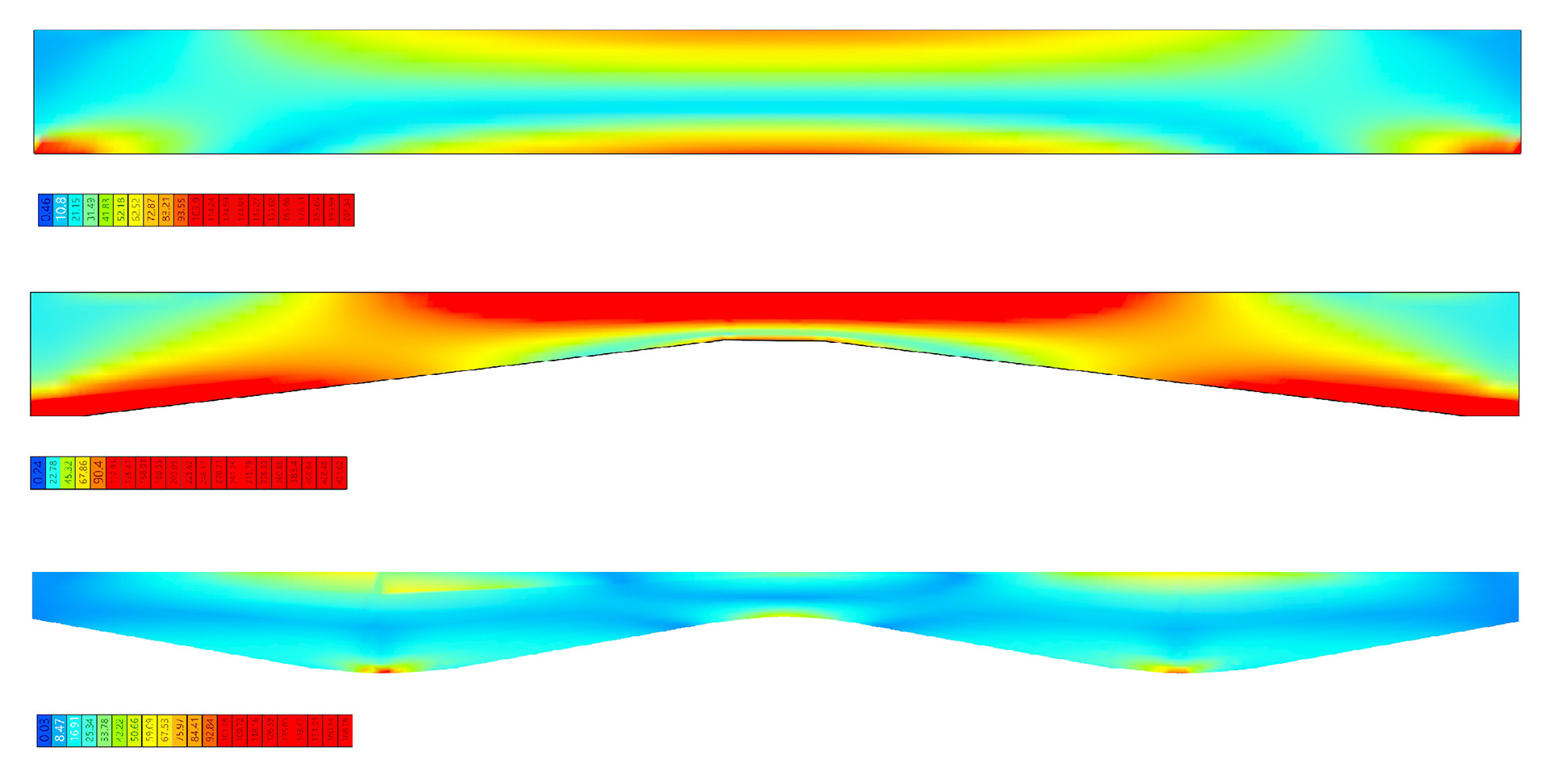
stress/strain utilization model of the the control beam (top), Beam A (middle), and Beam B (bottom)

perspective of Beam B